
 Objects are Different: Flexible Monocular 3D Object Detection(MonoFlex)
Objects are Different: Flexible Monocular 3D Object Detection(MonoFlex)
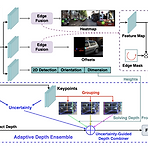
world center구하려면 3D object의 image에 투영된 center($u_{c}$, $v_{c}$)와 world depth($z$)가 필요하다. 이 논문에서는 크게 이 두 가지를 분리해서 구한다. 이 논문은 CenterNet의 확장이라고 볼 수 있다. CenterNet은 heatmap head, offset head, dimension head로 나누어져있다. heatmap head, offset head는 비슷한 기능을 하지만 3D point를 구하고, 이미지 안쪽과 이미지 바깥쪽에 있어 occlusion된 object를 구분하여 center를 구한다는 차이가 있다. Dimension head는 dimension orientation, 2d detection도 같이 구한다는 차이가 있다...
Deep Learning
2022. 2. 19. 23:27
최근에 올라온 글
TAG
- depth
- 디지털신호처리
- controllable GAN
- MLOps
- ML
- Deep learning
- Building Basic GAN
- image
- TRACKING
- machine learning
- Gan
- design pattern
- Raspberry Pi
- OS
- ML Pipeline
- AI
- depthmap
- mode collapse
- 운영체제
- DSP
- deeplearning
- 딥러닝
- pcb
- feature
- conditional GAN
- 3d object detection
- 신호처리
- Operating System
- Depth estimation
- Generative Model
- Total
- Today
- Yesterday
최근에 달린 댓글
링크
공지사항
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |
글 보관함